| Neues | Motoren | Slowfly | Segelflug | E-Flug | Helis | Luftbilder | Experimente | Videos | Links | inter-ex | Vakuum | neueLiebe |
Mein erster Hubschrauber wurde der LMH, den ich mir im Februar 2003 zulegte. Wegen seines Holzrumpfes wird er von meinen
Freunden liebevoll "HOLZHELI" genannt. In diversen Foren wurde der als bestes Einsteigermodell beschrieben.
Durch seine äußerst widerstandsfähigen Rotorblätter und den einfachen Aufbau ist er wirklich fast unkaputtbar.
Bei anderen Modellen kann das "Lehrgeld" schon mal den Kaufpreis mehrfach übersteigen. Beim LMH hält sich das in überschaubaren
Grenzen. Weil ich meine ersten Flugversuche bei sehr niedrigen Temperaturen veranstaltete, habe ich mehrere Zahnräder eingebüßt.
Das Material wurde dadurch einfach zu spröde und brach oft. Ansonsten benötigte ich nur sehr wenige Ersatzteile
bis ich das Schweben beherrschte.
Der LMH ist meines Erachtens wirklich ein Hubschrauber zum Lernen.

PAUSE bis Ende 2008. Bis auf gelegentliche Schwebewiederholungen tat sich in Sachen Heli nix mehr.
Allerdings sorgte ein PICCO-Z für den kleinen Flugspaß zwischendurch.
Ein BLADE mcx kam dann im Dezember 2008 dazu und wird auch heute noch im Zimmer herumgejagt.
Wenn man einmal vom Helivirus befallen war, kommt man kaum mehr davon los. Ende 2008 meldete sich dieser Virus ganz langsam wieder und steckte auch
noch weitere Modellbaufreunde an. Ein gebrauchter KDS 500 kam komplett ausgestattet ins Haus. Einige Freunde legten sich den baugleichen NOTOS 500 zu.


Mein Notos war schon recht gut, doch als ein befreundeter Helipilot seinen Acrobat SE auf unserem Platz flog, war das "Liebe auf den ersten Blick"!!
So leise, so eine extrem stabile Fluglage und dann die auf das Wesentliche reduziert Mechanik , so einen Heli hatte ich noch nie in Natura gesehen.
Natürlich kannte ich die Helis von Stephan Plöchinger aus den Foren, aber wenn der dann zum Anfassen vor einem steht ist das schon absolut überzeugend.
Bald reifte in mir der Wunsch, so einen auch zu fliegen. Im August 2009 war es dann so weit.
In einem der Modellbau-Foren entdeckte ich unter "Biete" das passende Gerät. Gebraucht, doch absolut neuwertig. Auch das großartige 3-Achsen Fluglagenregelungs System
AC-3X war schon enthalten.



Der LOGO 550SE eines Freundes hat mir bei einem Probeflug durch seine extrem stabile Fluglage besonders gut gefallen. Als der Heli dann zum Verkauf angeboten wurde, konnte ich nicht
nein sagen und schlug zu. Seit 2012 fliege ich diesen Heli leider viel zu selten. Aber irgendwie sind meine Nerven für das Helifliegen nicht mehr so stark, was wahrscheinlich
am fortgeschrittenen Alter liegt.


Trikopter - Hubschrauber mit drei Rotoren??
Quadrokopter - Hubschrauber mit 4 Rotoren??
Besser wäre vielleicht der Begriff MULTIKOPTER, da es die auch mit 4, 6 oder sogar mit 8 "Rotoren" gibt.
Multikopter haben mich schon seit geraumer Zeit extrem interessiert. Nur waren die, die mir gefallen haben viel zu teuer.
Da entdeckte ich bei rc-network unter Experimentalmodellbau etwas sehr interessantes über TRICOPTER.
Ein Tricopter ist eigentlich ein Hubschrauber mit 3 Rotoren (Luftschrauben) aufgebaut mit Aluvierkantrohr und einer kleinen Plattform für Elektronik und den Akku.
Der dort vorgestellte Tricopter soll gegenüber allen anderen Systemen völlig "ohne eigene Intelligenz, nur über Kreisel stabiliesiert" fliegen.
Das klang so unvorstellbar, dass ich mich über weiterführende Links informierte.
Ein schwedischer Modellbauer stellt dort auf seiner Homepage sein Projekt vor.
Äußerst ausführlich, sehr genau und mit vielen Bildern unterlegt, kann man danach seinen eigenen Tricopter aufbauen und einstellen.
Tatsächlich soll mit nur 4 billigen Gyros aus China und einer Fernsteuerung mit Heliprogramm ein kostengünstiger, stabil schwebender und fliegender Tricopter entstehen. Im Netz gibt es mittlerweile
sehr viele Viedeos und Kommentare zu diesem Thema.
Nachdem ich alle Teile geliefert bekam baute ich in wenigen Stunden meinen TRI. Die folgende Programmierung
des Senders war da schon anspruchsvoller. Nach mehreren Fehlversuchen klappte es dann doch. Zuerst wurde der TRI vorsichtig in der Hand gehalten und die nötigen Einstellungen
vorgenommen, bis alles zur Zufriedenheit klappte.
Dann kam der spannende Moment des Erstfluges im Garten. Der verlief aber völlig unspektakulär. Der Tricopter hob sachte ab und konnte mit wenigen Trimmeinstellungen zu fast driftlosem Schweben gebracht werden.
Es ist einfach großartig, dass so ein "billiges" Teil so gut fliegt. Ein großes Lob an den "Erfinder".
Für die weiteren Flugversuche kamen mir meine Helierfahrungen zugute. Großräumiges Fliegen klappte auf Anhieb. Natürlich kam es auch zu "harten Landungen". Doch erstaunlicherweise passiert immer sehr wenig. Gebrochene Propeller,
verbogene Ausleger und zwei Getriebeschäden am Servo waren leicht zu verschmerzen. Ich mag mir garnicht vorstellen was solche Abstürze bei meinem Heli gekostet hätten.
Parallel dazu gibt es eine weitere Entwicklung eines Rolf R Bakke mit dem Namen KK-Kopter. Unter diesem Link
stellt er sein von ihm entwickeltes BOARD vor, das die Möglichkeit bietet vom TRICOPTER bis zum SEXTACOPTER alles anzusteuern, und das mit einem Flächenprogramm eines einfachen Senders. Auf dem Board sind 3 ausgelötete Sensoren
aus den billigen China-GYROS untergebracht. Mittlerweile gibt es von der unbestückten Platine bis zum fertigen, getesteten Board alle Variationen zu diesem Thema zu kaufen.
Es reizte mich nun auch dieses Board auf den vorhandenen Trikopter zu bauen. Die Gyros wurden "geschlachtet" und deren Sensoren (Gyroskop oder Kreiselinstrument)in das vorher zusammengelötete Board gebaut.
Die Einstellung erfolgt nur mittels dreier Potentiometer auf dem Board.
Die sehr gute Dokumentation machte es ziemlich einfach den KK-Tricopter zum Fliegen zu bringen.
Und tatsächlich fliegt der Trikopter mit diesem Board um einiges stabiler.


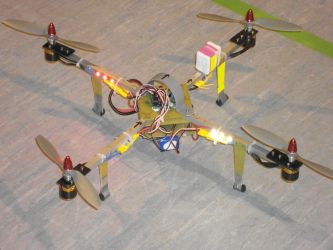
Der Quadrokopter war dann auch ziemlich schnell gebaut. Die Entfernung von Motorachse zu Motorachse beträgt 54cm.
Der Aufbau erfolgte nach dem bewährten Konzept des Trikopters. Der Erstflug war dann am 12.Dez. in der Halle.
Der Kleine macht noch mehr Spaß, da er natürlich wesentlich agiler ist.
Ich bin mir aber sicher, dass das noch nicht das Ende der "Kopterbauerei" ist.

Nach vielen wunderbaren Flügen und auch Abstürzen, hatte ich innerhalb weniger Wochen im Juli 2011 zwei TOTALVERLUSTE!!!
Immer nach dem gleichen Muster. Plötzlich war der Kopter nicht mehr steuerbar. Aber er schwebte absolut horizontal
und stieg ganz langsam nach oben. Durch leichten Wind abgetrieben wurde er immer kleiner und stürzte nach etwa einer Munute senkrecht nach unten.
Der erste fiel vermutlich in den nahegelegenen Fluss ISAR, der andere verschwand in irgendeiner Wiese mit sehr hohem Gras, so dass selbst
intensive Suche keinen Erfolg brachte.
Dann passierte das Gleiche nocheinmal. Diesmal verschwand er im nahe gelegenen Wald. Nach langem Suchen fand ich 3 Teile, aber der Kopter
blieb verschollen. Als wir Suchenden frustriert zum Fluggelände zurück kamen stand mein Kopter praktisch unbeschädigt da.!!!
Spaziergänger hatten den Absturz beobachtet, den Kopter geborgen und zum Fluplatz gebracht. Da war die Freude groß.
Jetzt war der Verdacht nahe, ob denn vielleicht das Jeti-Sendermodul keine Reichweite mehr hatte???
Einige Versuche bestätigten das. Nach etwa 30 - 40 Metern war Schluss.
Warum aber stürzte der Kopter dann nicht gleich ab??
In der Kopter-Software entdeckte ich die Lösung. Dort ist eine Failsaferoutine versteckt, die ich nie beachtet hatte.
Bei Sendersignalausfall wird zuerst das Gas auf einen bestimmten Wert gefahren. Natürlich stand auch dabei, dass man den Wert
anpassen muss!!!
Dann werden die Horizontalwerte der Sensoren aktiviert, so dass der Kopter immer waagerecht in der Luft steht. Und die dritte
Einstllung war, dass nach 25 Sekunden die Motoren abgestellt werden.
Richtig eingestellt würde das bedeuten, dass der Kopter im Failsafefall leicht sinkt und nach etwa einigen Sekunden die Motoren dann stromlos
geschaltet werden. Die Werte müsste man halt den eigenen Bedürfnissen anpassen.
Nacher ist man ja bekanntermaßen immer schlauer.


Im August 2011 bekam er dann ein etwas kürzeres Landegestell und ein neues Board. Dieses Board ist eine Entwicklung
von "X_Spieler" das im X-Ufo-Forum
vorgestell wurde.
Hier ist die Elektronik auf das Wesentliche beschränkt. Nur noch ein ATMEL Prozessor, ein 3-Achs-Gyroskop und einige zusätzliche Kleinigkeiten.
Inzwischen (Oktober 2011) habe ich meine Quadrokopter-Flotte wieder auf 3 Exemplare aufgestockt.
Der Neueste ist ein wirklicher Zwerg mit nur 30 cm Motorachsabstand.
Die passenden Keda-Motoren sind ein Geschenk von Stephan. Durch den 3s 1500mAH Lipo erreiche ich locker Flugzeiten jenseits der 10-Minuten-Marke.
Mit diesem Winzling ist "pilotennahe" Akrobatik ein purer Genuss. Bodenkontakte nimmt er überhaupt nicht krumm.
Da ich die Ausleger nur mit einer Schraube gesichert habe, drehen die bei Bodenberührungen ohne zu verbiegen seitlich weg. Nach dem
Ausrichten der Arme kann ich sofort weiterfliegen. Bei vielen Flügen ist mir bisher nur ein Prop abgebrochen.


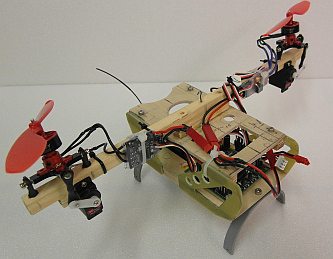
aber auch BI-copter, TWIN-copter oder DUAL-copter genannt.
Es funktioniert aber auch nur mit 2 Luftschrauben. (Experimental-Modell)
Das inzwischen schon legendäre KK2.0 Board von Hobbyking hat ja den großen Vorteil, dass alle Einstellungen ohne Computer
gemacht werden können, da es ein eigenes Display besitzt.
Wie viele andere Boards kann man damit auch BI-copter ansteuern. 2 Motorregler und 2 Servos übernehmen die Arbeit.
Auf YOUTUBE gibt es viele, teilweise sehr stabil fliegende Beispielcopter.
Ein MINI-Twincopter von "yasou840" hat es mir besonders angetan.
Bis auf die 2 Motoren waren alle Komponenten vorhanden.
Doch zuerst war die Enttäuschung groß. Das Teil wollte sich einfach nicht stabilisieren.
Trotz einiger Programmierbeispiele für Twincopter gab es keine Fortschritte.
Nach langen Versuchsreihen spielte ich die etwas ältere Software 1.4 auf das Board und war begeistert, dass schon mit den
Standardwerten ein ziemlich stabiler Flug möglich war. Nach diversen Einstellungsänderungen fliegt der Kleine nun zur
vollsten Zufriedenheit.
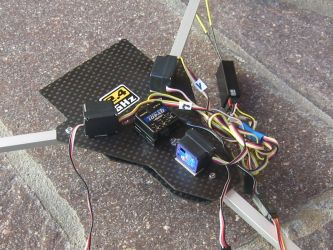
Jetzt ging es ans "Abspecken". Durch einige Materialänderungen und "Beschneidungen" konnte ich über 50 Gramm einsparen.
Sogar mit nur einem 2s 500mAh Akku habe ich schon etwa 4 Minuten Flugzeit.
Nachdem der Copter in einem "Hallentest" sehr gut abgeschnitten hat, baute ich am 11. Feb. 2014 eine um etwa 50g leichtere und
optisch etwas ansprechendere Zelle. (3. Bild)
Video